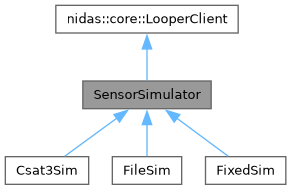
Base class for sensor simulators. More...
Public Member Functions | |
| SensorSimulator (n_u::SerialPort *p, bool prompted, string prompt, float rate, int nmessages) | |
| virtual void | sendMessage ()=0 |
| Implement this to send a message from the simulated sensor. | |
| virtual void | writeMessage (const std::string &msg) |
| Subclasses generate the message to send, then call writeMessage() to send it out. | |
| virtual void | writeMessage (const char *buf, std::streamsize l) |
| overloaded function useful for writing binary data | |
| virtual void | run () |
| Default implementation of run will call the sendMessage() method either after receipt of a prompt or at the given rate if the sensor is not prompted. | |
| void | interrupt () |
| Stop the simulation. | |
| bool | isInterrupted () const |
| n_u::SerialPort * | port () |
Protected Member Functions | |
| Looper * | getLooper () |
| void | looperNotify () override |
| Method called by Looper. | |
| void | readPrompts () |
| SensorSimulator (const SensorSimulator &) | |
| SensorSimulator & | operator= (const SensorSimulator &) |
Protected Attributes | |
| n_u::SerialPort * | _port |
| bool | _prompted |
| string | _prompt |
| float | _rate |
| int | _nmessages |
| bool | _interrupted |
Static Protected Attributes | |
| static Looper * | _looper = 0 |
Detailed Description
Base class for sensor simulators.
Constructor & Destructor Documentation
◆ SensorSimulator() [1/2]
|
inline |
◆ SensorSimulator() [2/2]
|
protected |
Member Function Documentation
◆ getLooper()
◆ interrupt()
|
inline |
Stop the simulation.
References _interrupted.
Referenced by looperNotify(), readPrompts(), FileSim::sendASCIIMessage(), and FileSim::sendBinaryMessage().
◆ isInterrupted()
|
inline |
References _interrupted.
Referenced by readPrompts().
◆ looperNotify()
|
overrideprotectedvirtual |
Method called by Looper.
This method should not be a heavy user of resources, since the notification of other clients is delayed until this method finishes. If much work is to be done, this method should post a semaphore for another worker thread to proceed.
Implements nidas::core::LooperClient.
References _interrupted, _looper, _nmessages, nidas::core::getSample(), interrupt(), and sendMessage().
◆ operator=()
|
protected |
◆ port()
|
inline |
References _port.
◆ readPrompts()
|
protected |
References _nmessages, _port, _prompt, nidas::core::getSample(), interrupt(), isInterrupted(), nidas::util::SerialPort::readchar(), and sendMessage().
Referenced by run().
◆ run()
|
virtual |
Default implementation of run will call the sendMessage() method either after receipt of a prompt or at the given rate if the sensor is not prompted.
run() will return when isInterrupted() is true.
Reimplemented in Csat3Sim.
References _looper, _prompted, _rate, getLooper(), nidas::core::getSample(), MSECS_PER_SEC, and readPrompts().
◆ sendMessage()
Implement this to send a message from the simulated sensor.
- Exceptions
-
nidas::util::IOException
Implemented in FixedSim, FileSim, and Csat3Sim.
Referenced by looperNotify(), and readPrompts().
◆ writeMessage() [1/2]
overloaded function useful for writing binary data
References _port, and nidas::util::SerialPort::write().
◆ writeMessage() [2/2]
Subclasses generate the message to send, then call writeMessage() to send it out.
References _port, and nidas::util::SerialPort::write().
Referenced by FileSim::sendASCIIMessage(), FileSim::sendBinaryMessage(), and FixedSim::sendMessage().
Member Data Documentation
◆ _interrupted
|
protected |
Referenced by interrupt(), isInterrupted(), and looperNotify().
◆ _looper
|
staticprotected |
Referenced by getLooper(), looperNotify(), and run().
◆ _nmessages
|
protected |
Referenced by looperNotify(), readPrompts(), and Csat3Sim::run().
◆ _port
|
protected |
Referenced by port(), readPrompts(), Csat3Sim::run(), Csat3Sim::sendMessage(), writeMessage(), and writeMessage().
◆ _prompt
|
protected |
Referenced by readPrompts().
◆ _prompted
◆ _rate
|
protected |
Referenced by run(), and Csat3Sim::run().
The documentation for this class was generated from the following file:
- nidas/apps/sensor_sim.cc