The Ka-band system for S-Pol was still undergoing development just prior to the RICO experiement. Not all engineering issues had been worked out for the system. As a result, it has been necessary to carefully review all system characteristics and data in a "post-project" mode. This on-line whitepaper details some checks performed on Ka system noise power, and provides an analysis of the results.
During the course of the RICO experiment, it became apparent that the Ka system's noise power was varying somewhat with time. There was also the possibility that the Ka vertical co-polar noise power was varying with radar scan elevation angle. In addition, there were reasonable doubts about the accuracy of engineering measurements of the system noise. On top of all this, there was speculation that the two co-polar receivers had a "wandering bias" that would evidence itself as shifts in the calibration of the receivers, shifts that could show up as a variation in the noise floor of the system.
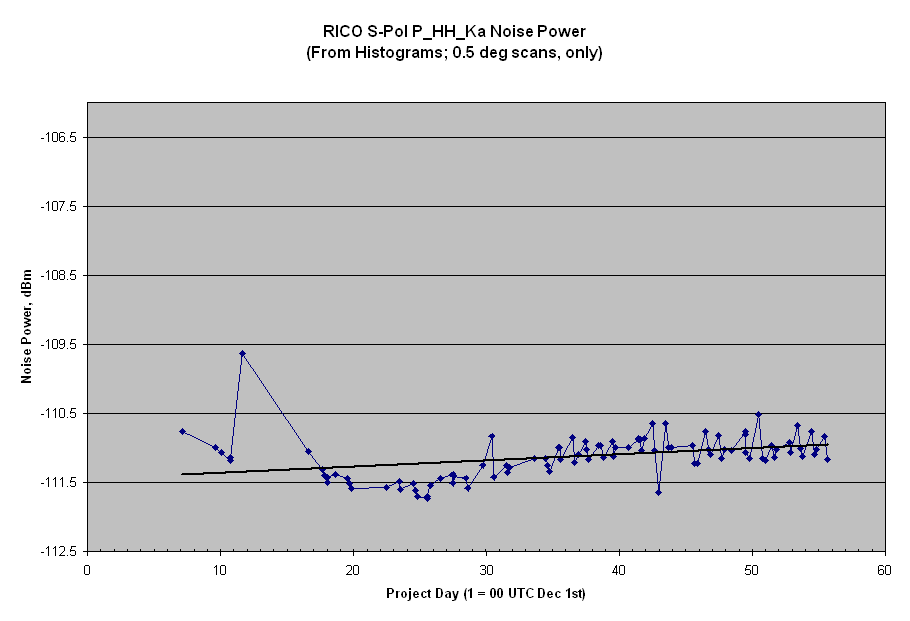
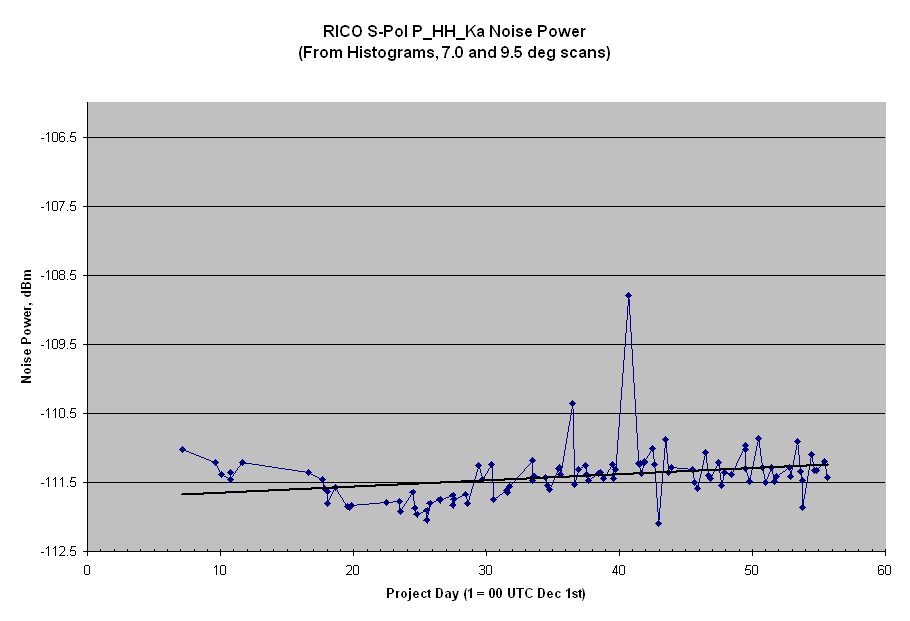
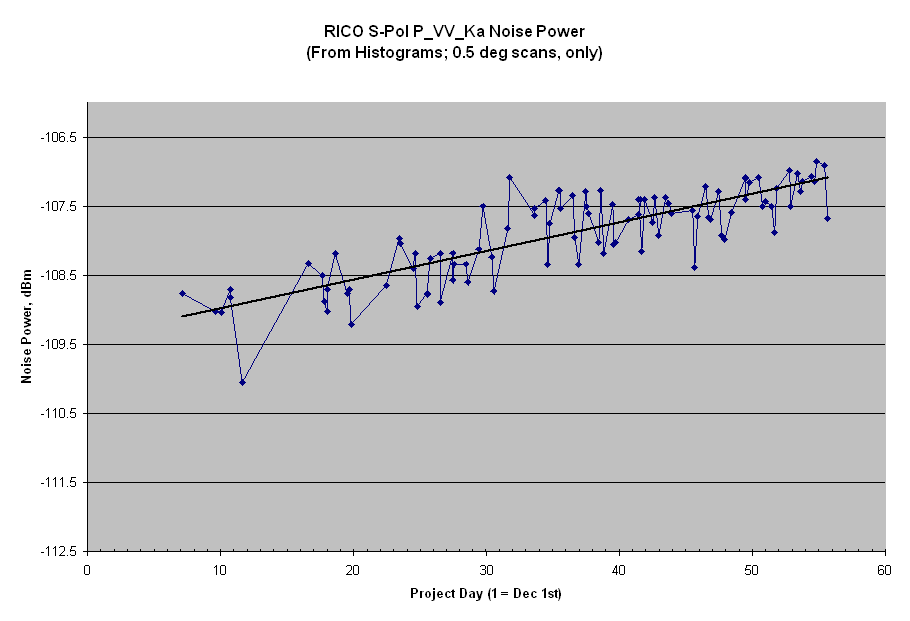
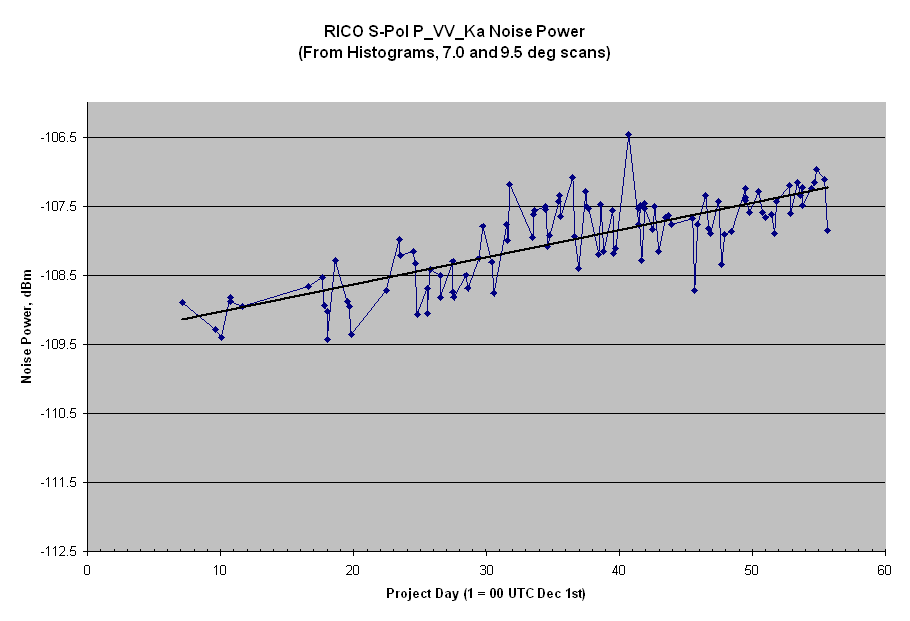
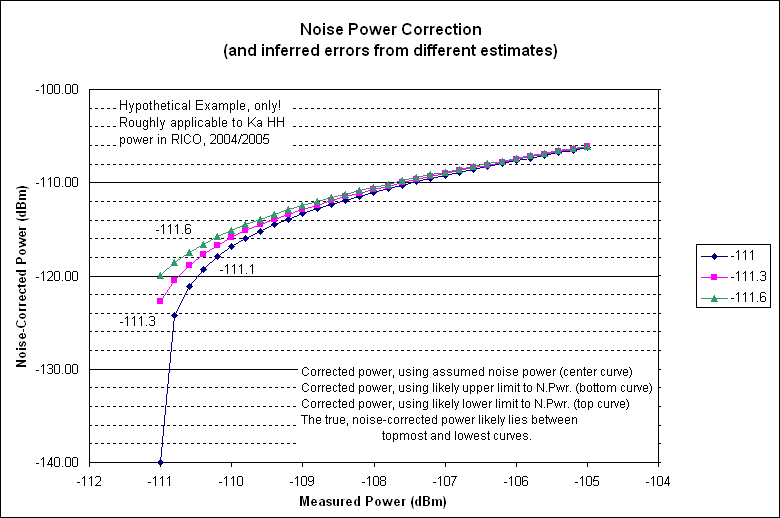
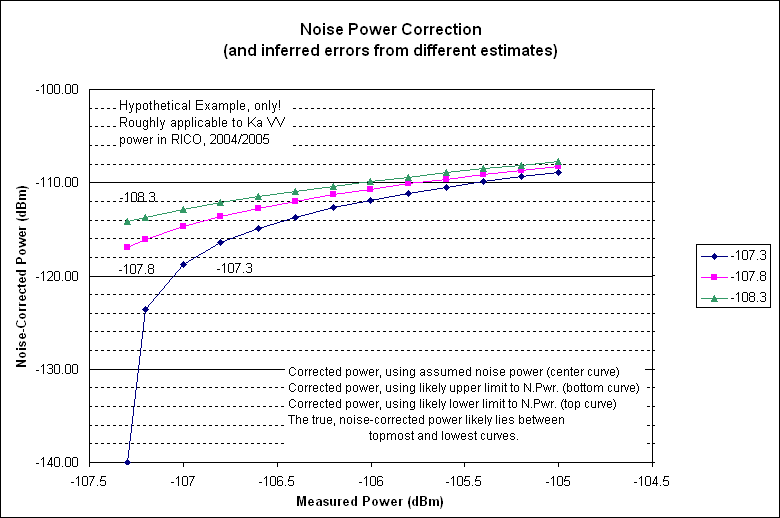
Since reflectivity values are calculated using a "noise corrected" received power (and the noise correction is non-linear), it was decided to produce a formal time-history of both the Ka VV and Ka HH noise power, and to filter those histories based upon scan elevation angle.
Noise power can be estimated by measuring the power received from a region of the radar scan where there is no expected echo return, and where the infrared "glow" of the earth, hydrometeors and sun are insignificant. Ideal regions to monitor are above the atmosphere, away from the sun, and where the radar beam does not intercept any clouds or precipitation. During RICO operations, it was rare to scan completely above the atmosphere, so this requirement was relaxed to the extent that regions were used that included no radar echoes, at either Ka-band or S-band; it was still required that the radar had an unobstructed "view" of such regions (no precip between the radar and the region, and no sun or ground clutter influence).
The Ka band radar did not operate continuously. The Ka also required at least an hour to "warm-up" before it reached reasonably stable operating condition.
The data in the noise power plots (above) were somewhat noisy, making determination of the noise powers somewhat subjective. Some attempt was made to link changes in noise power to known changes in system hardware configuration. The following noise powers were ultimately used:
Inclusive dates Noise_HH Noise_VV
(dBm) (dBm)
20041124-20041215 -111.30 -109.2
20041216-20041218 -111.30 -108.69
20041219-20041228 -111.82 -108.69
20041229-20050125 -111.35 -107.66